6-akset industriell robotisk samarbeidende robotarm for emballasje


6-akset industriell robotisk samarbeidende robotarm for emballasje
Hovedkategori
AGV AMR / løfteutstyr AGV AMR / AGV automatisk styrt kjøretøy / AMR autonom mobil robot / AGV AMR-bil for industriell materialhåndtering / Kina-produsent AGV-robot / lager AMR / AMR løfteutstyr laser SLAM-navigasjon / AGV AMR mobil robot / AGV AMR chassis laser SLAM-navigasjon / intelligent logistikkrobot
Søknad

AMB-serien ubemannede chassis AMB (Auto Mobile Base) for autonome AGV-kjøretøy er et universelt chassis designet for autonome AGV-kjøretøy, og tilbyr noen funksjoner som kartredigering og lokaliseringsnavigasjon. Dette ubemannede chassiset for AGV-vogn tilbyr rikelig med grensesnitt som I/O og CAN for å montere ulike øvre moduler sammen med kraftig klientprogramvare og forsendelsessystemer for å hjelpe brukere med raskt å fullføre produksjon og bruk av autonome AGV-kjøretøy. Det er fire monteringshull på toppen av AMB-seriens ubemannede chassis for autonome AGV-kjøretøy, som støtter vilkårlig utvidelse med jekking, ruller, manipulatorer, latent trekkraft, display osv. for å oppnå flere bruksområder for ett chassis. AMB kan sammen med SEER Enterprise Enhanced Digitalization realisere enhetlig forsendelse og distribusjon av hundrevis av AMB-produkter samtidig, noe som forbedrer det intelligente nivået av intern logistikk og transport i fabrikken betraktelig.
Trekk
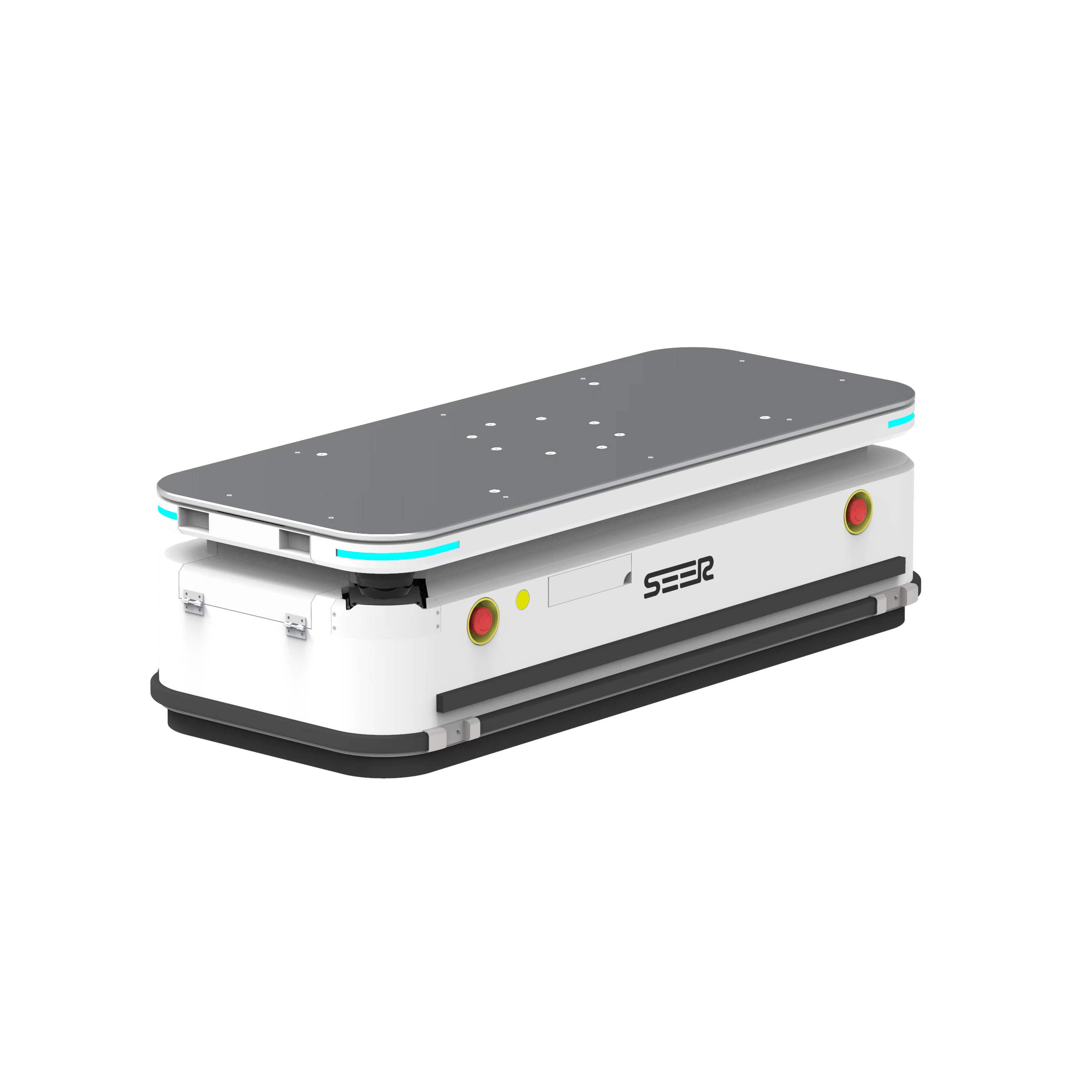
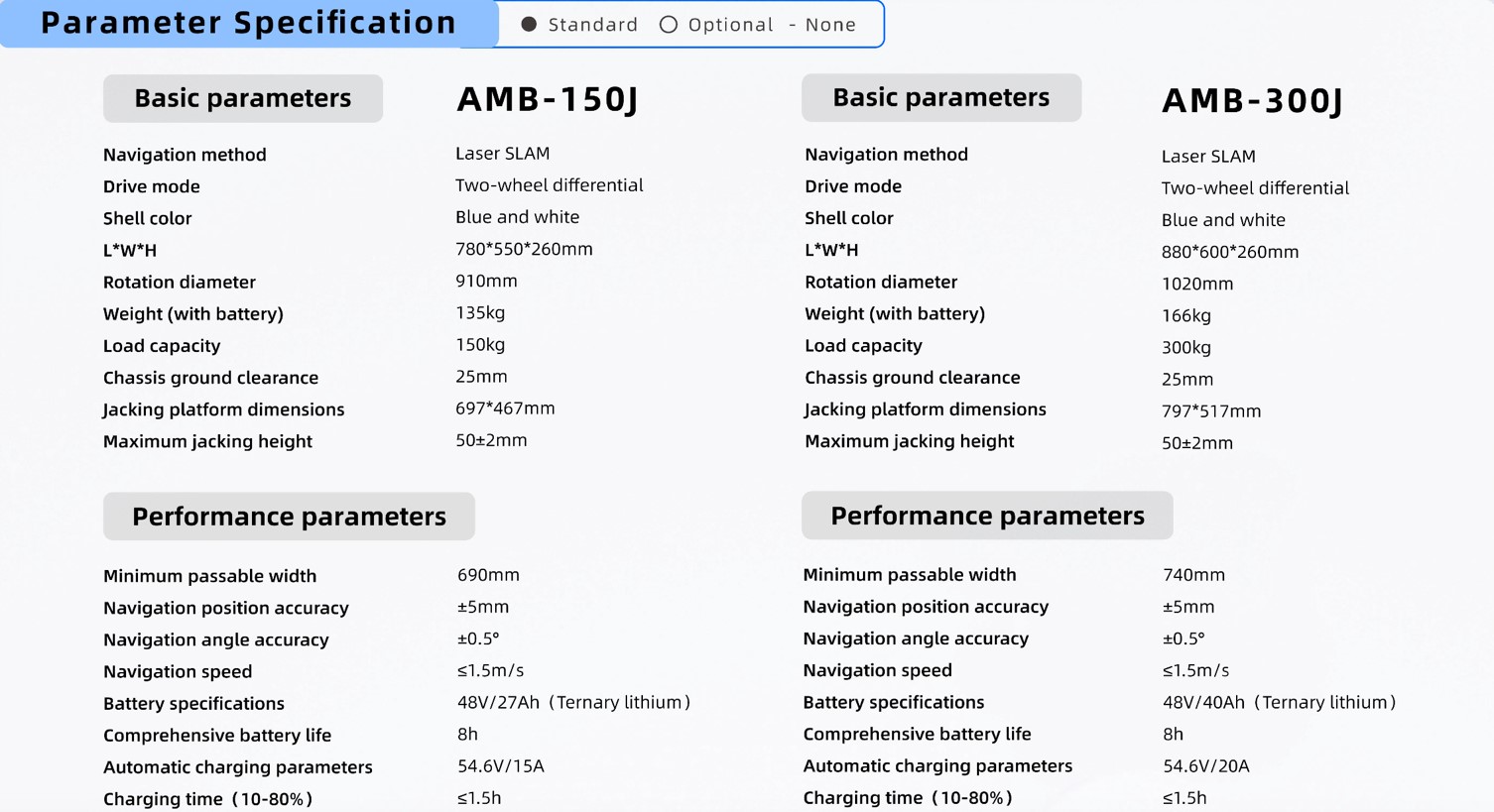
·lastekapasitet: 150 kg og 300 kg
· maks. jekkehøyde: 50 mm
·navigasjonsposisjonsnøyaktighet: ±5 mm
·navigasjonsvinkelnøyaktighet: ±0,5°
● Rike funksjoner tilgjengelig når som helst
Omfattende og utmerkede standardfunksjoner og rike og praktiske avanserte funksjoner hjelper kundene med å enkelt oppnå intelligent logistikk.
● Plattformer med flere spesifikasjoner tilgjengelig for utvidelse
Tilbyr plattformer på 150 kg og 300 kg for å møte last- og scenekravene i ulike bransjer. Den kan også brukes med manipulatorer, ruller, jekker, latent trekkraft, panorering/tilt, skjerm osv. for å oppnå flere bruksområder med ett chassis.
● ±5 mm, effektiv og nøyaktig
Laser SLAM-algoritmen brukes til å oppnå høypresisjonslokalisering, med laserens ikke-reflekterende repeterende lokaliseringsnøyaktighet innenfor ±5 mm, noe som muliggjør sømløs docking mellom mobile roboter og mennesker, og effektiv flyt av last mellom ulike punkter. Merk: Faktiske verdier avhenger av miljøforholdene.
● Stabil navigasjon for sikkerhet og pålitelighet
Laser SLAM-navigasjon, laserreflektornavigasjon, QR-kodenavigasjon og andre navigasjonsmetoder er perfekt integrert og sømløst byttet for å sikre stabil drift av den mobile roboten.
● Enkel implementering og synlig administrasjon
Et komplett utvalg av støttende programvare og digitale systemer kan enkelt realisere drift, planlegging og informasjonshåndtering av mobile roboter, og sømløst kobles til fabrikkens MES-system for virkelig å realisere smart logistikk.
Relaterte produkter



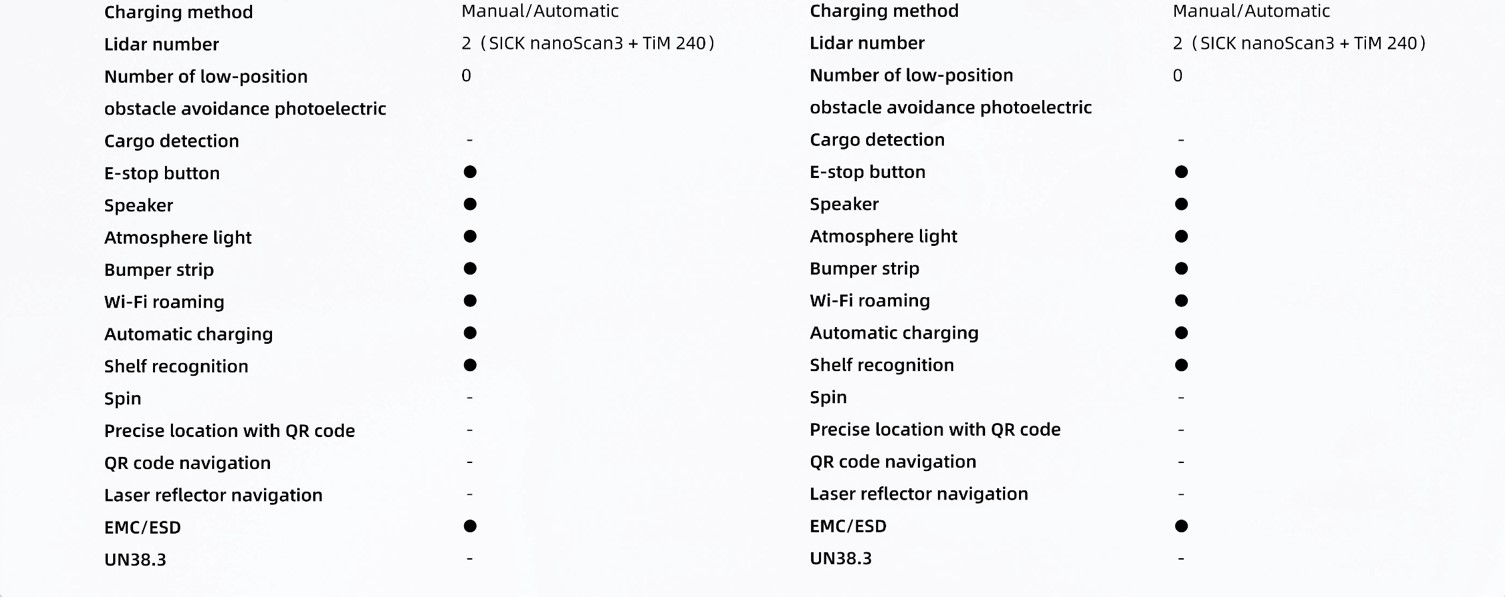
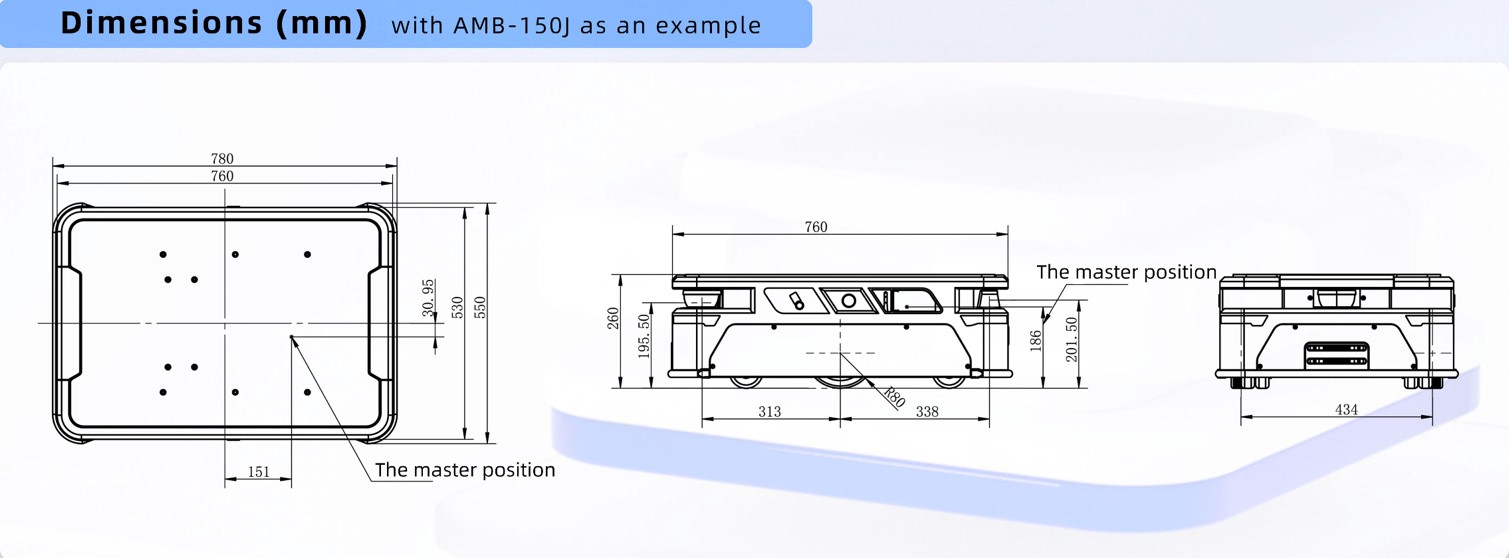
Spesifikasjonsparameter
Vår virksomhet


Produktkategorier
-

Lh1850-B-6 6-akset sveisemaskin automatisk in...
-

1000 kg smart lasernavigasjon elektrisk automat...
-

6-akset robotarm industriell robotarm robotarm ...
-
Automatisk industriell robotsveisemaskin Ar...
-

6-akset industriell robotarm Szgh-I5 samarbeidsrobot...
-
Lavprismontering, palletering, polering, sprøyting...